欧卡智舶-智能船舶系统

辅助驾驶系统
不参与船舶的直接操控,提供全面的航行驾驶辅助。让每一次航行更加安全、轻松。

高级辅助驾驶系统
参与船舶的操控,提供超越人工驾驶的乘坐体验。让驾驶变得更加省心、高效。

水面自动驾驶控制器

显示与交互终端

4D毫米波雷达

高性能激光雷达

船用摄像头
产品优势

减轻船员负担
自动化和半自动化的辅助驾驶功能可以帮助船员处理重复性和复杂性任务,如航线行驶、危险识别等,从而减轻他们的工作压力

易于安装
辅助驾驶系统采用模块化设计,可以根据需要进行选配和升级,并可以轻松与船载AIS系统、导航雷达等设备集成

提升效率
辅助驾驶系统可以优化航行效果,减少燃料消耗和运行成本,同时提高航行的整体效率
提高安全性
辅助驾驶系统能够7×24实时监控船舶的周围环境,包括其他船只、浮标、浅滩和障碍物等,从而减少碰撞和搁浅的风险

先进感知
目标识别
通过先进的人工智能算法,准确识别水面目标的类型、距离、速度等,并进行可视化展现。
实时环境地图
通过融合激光雷达、毫米波雷达、摄像头传感器数据,准确、可靠地显示周围环境实时障碍物信息。


碰撞预警
根据周围环境和船舶运动状态,进行态势感知,对各类碰撞风险进行预警。
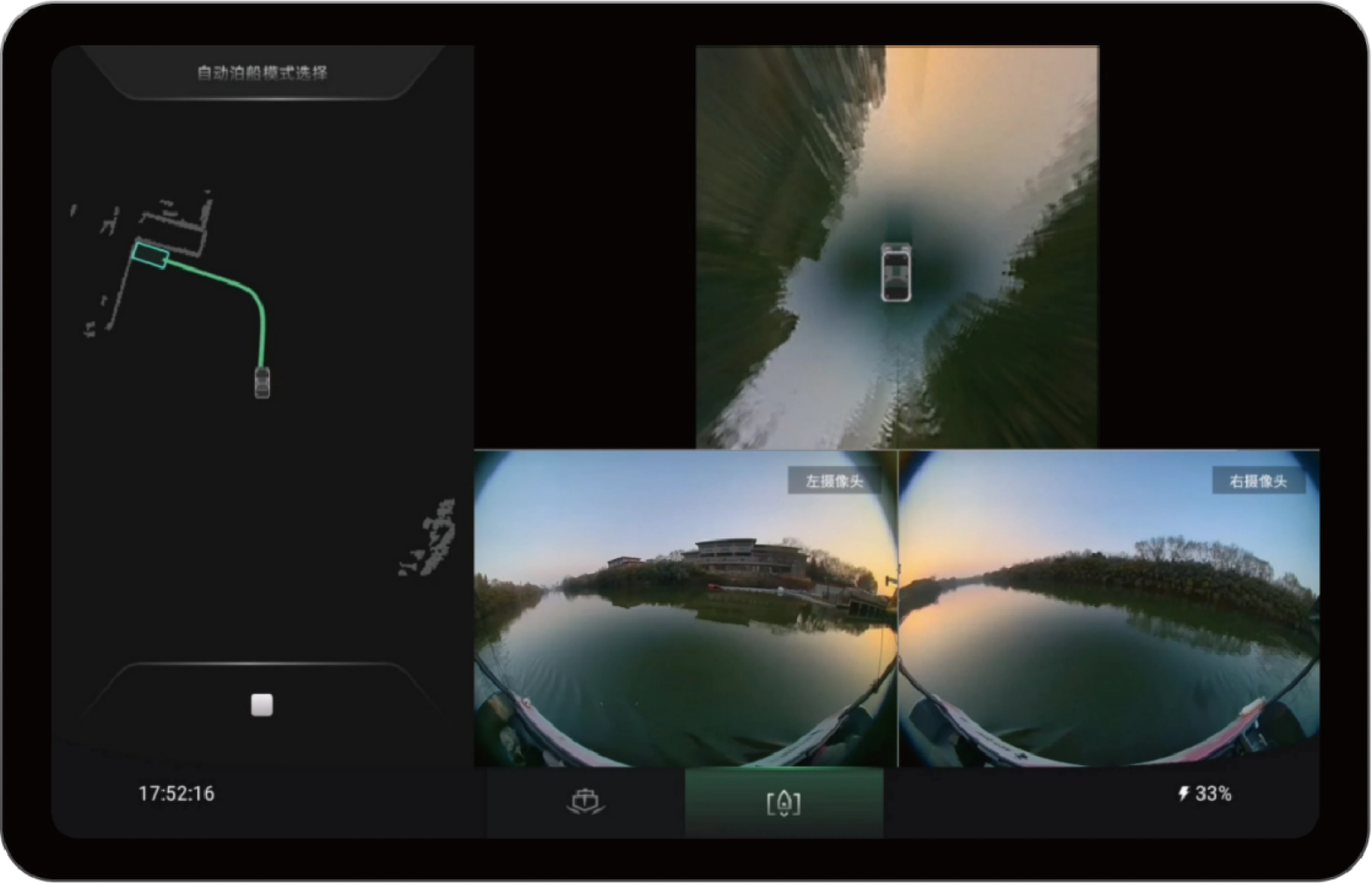
360°环视影像
以360°真实视频图像呈现周边环境,可实时直观观察船舶周围环境,确保无视野死角和盲区。


自主航行
定向航行
利用先进的导航技术和控制算法,并根据外部环境的变化,如风向、水流等,进行实时调整,以确保船舶始终沿着设定的航向前进。
航线保持
结合高精度的导航技术与自适应控制算法,有效抵御风浪的影响,无论在面对直线还是曲线航段时,确保船舶都能够沿着既定航线,安全高效地行驶。

自主避障
将避碰规则以及专业船员的航行经验融入自主避障算法,通过环境感知、自主规划路径以及自动控制,实现安全、平稳的自主避碰。
动力定位
根据实时监测的风向、流速等信息,自动调整船舶的动力和舵向,实现精确的定点悬停,确保船舶在指定位置稳定停留。
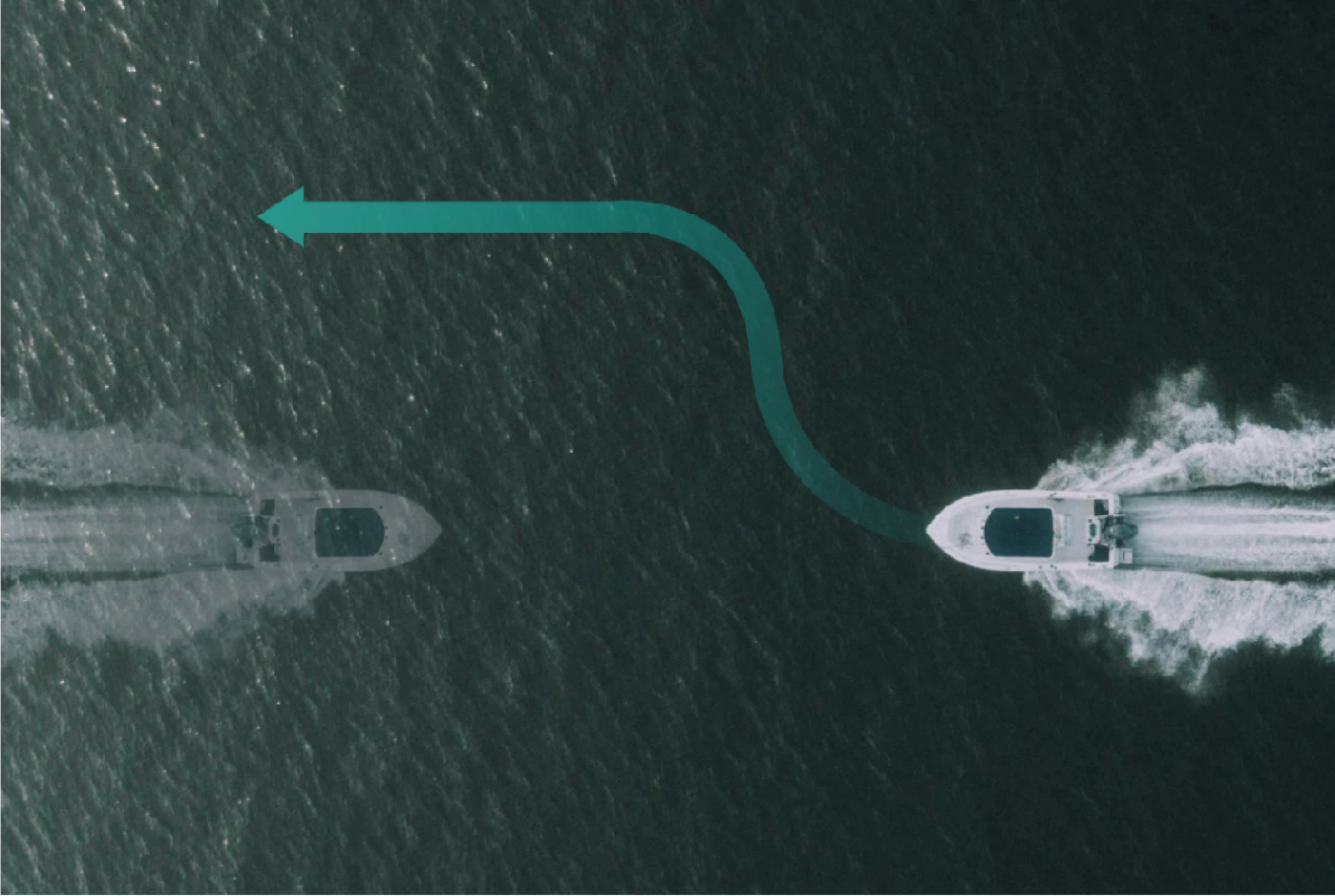
自动靠离泊
通过自主识别停泊位和判断停泊条件,自动调整船舶的速度、方向,确保船舶安全,稳定地靠泊和离泊。
靠泊
模式一
船舶航行至码头附近
自主识别停靠点
选择停泊点
选择停泊方向
船舶自主规划路线
自主停泊
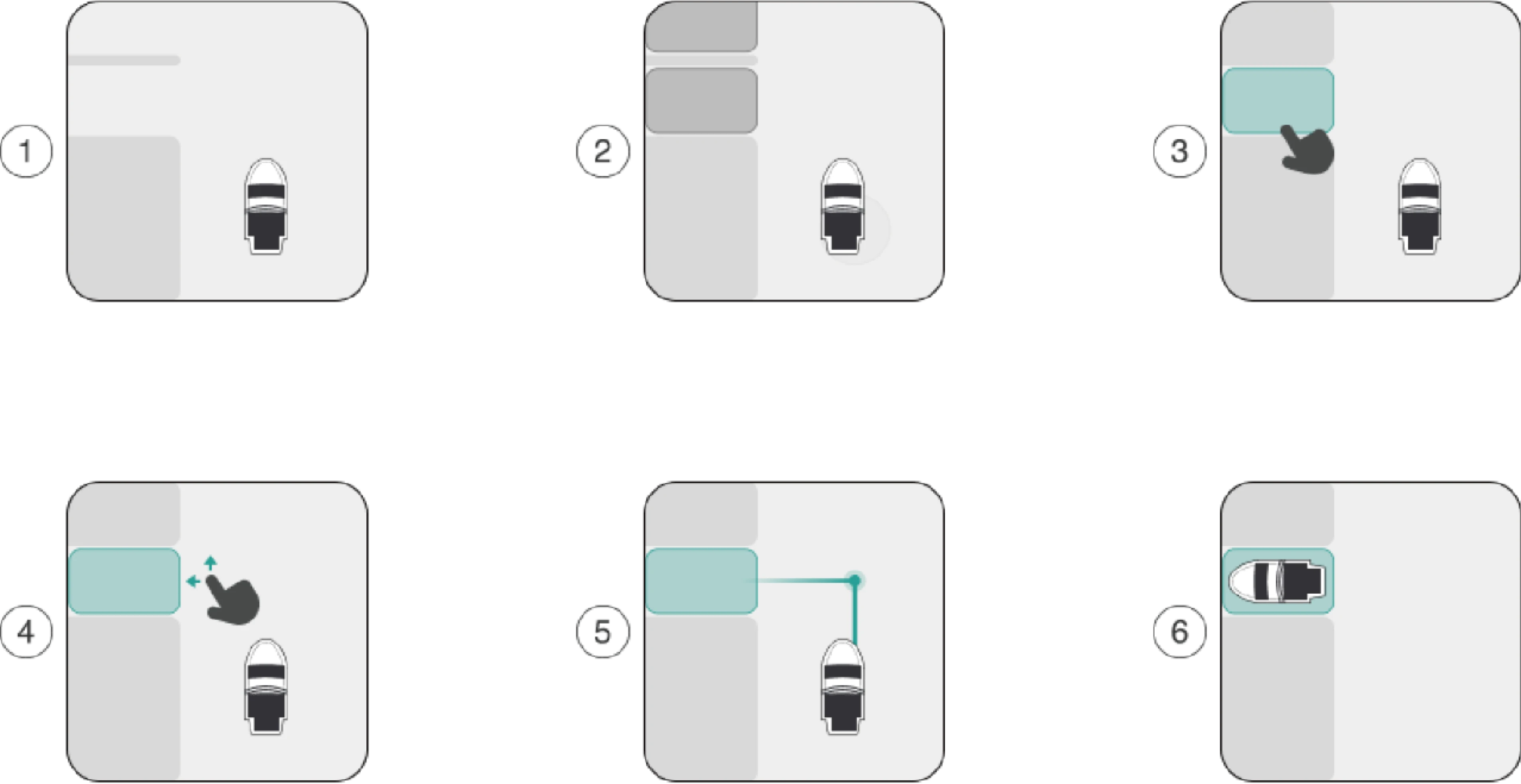
模式二

选择记忆的历史停泊位
点击启动
船舶自主规划路线
自主停泊
离泊
点击启动
分析周围环境
自动规划路线
行驶出停泊位
 陕公网安备61019002002774
陕公网安备61019002002774
