ORCAUBOAT Advanced Systems for Intelligent Sailing(OASIS)

OASIS - Insight
OASIS-Insight doesn`t directly engage in control of the vessel. It provides comprehensive navigation assistance, which makes each voyage safer and more relaxed.

OASIS - Pilot
OASIS-Pilot engages in active control of the boat, offers a sailing experience that surpasses manual operation and makes navigation worry-free and more efficient.

Autonomous Navigation Controller

Display and Interaction Terminal

4D Millimeter Wave Radar

High-Performance LiDAR

Marine Camera
Advantages

Reduce the Burden of Boat Operator
The automated and semi-automated assistance sailing systems can help the operator handle repetitive and complex tasks, such as route navigation and hazard identification, thereby reducing their workload.

Easy to Install
OASIS features a modular design that allows for customizable selection and upgrades as needed, and can be easily integrated with onboard AIS systems, navigation radar, and other equipment.

Enhance Efficiency
OASIS can optimize navigation outcomes, reduce fuel consumption and operational costs, while simultaneously increasing overall navigation efficiency.
Improve Safety
OASIS is capable of 24/7 real-time monitoring of the boat`s surroundings, including other boats, buoys, shallows, and obstacles, thus significantly reducing the risk of collisions.

Advanced Perception
Object Detection
Accurately identifying targets by type, distance, and speed based on advanced AI algorithms, and provide an intuitive visualization results.
Real-time Environmental Mapping
Displaying real-time obstacle information of the surrounding environment accurately and reliably by fusing sensor data from LiDAR, millimeter-wave radar, and cameras.


Collision Warning
Perceiving the surrounding environment and monitoring the vessel`s motion state to provide early warnings for various collision risks.
360° Surround View
Presenting the real surrounding environment with full 360° visibility, allowing for real-time and intuitive observation of the boat`s surroundings to avoid blind spots.


Autonomous Navigation
Course Keeping
Using advanced navigation and control technology, and making real-time adjustments based on changes in external conditions, such as wind and currents, to ensure that the vessel consistently follows the course.
Route Tracking
Integrating high-precision navigation technology with adaptive control algorithms to effectively reduce the influence of wind and waves, ensuring that the vessel maintains its course safely and efficiently whether on straight or curved routes.
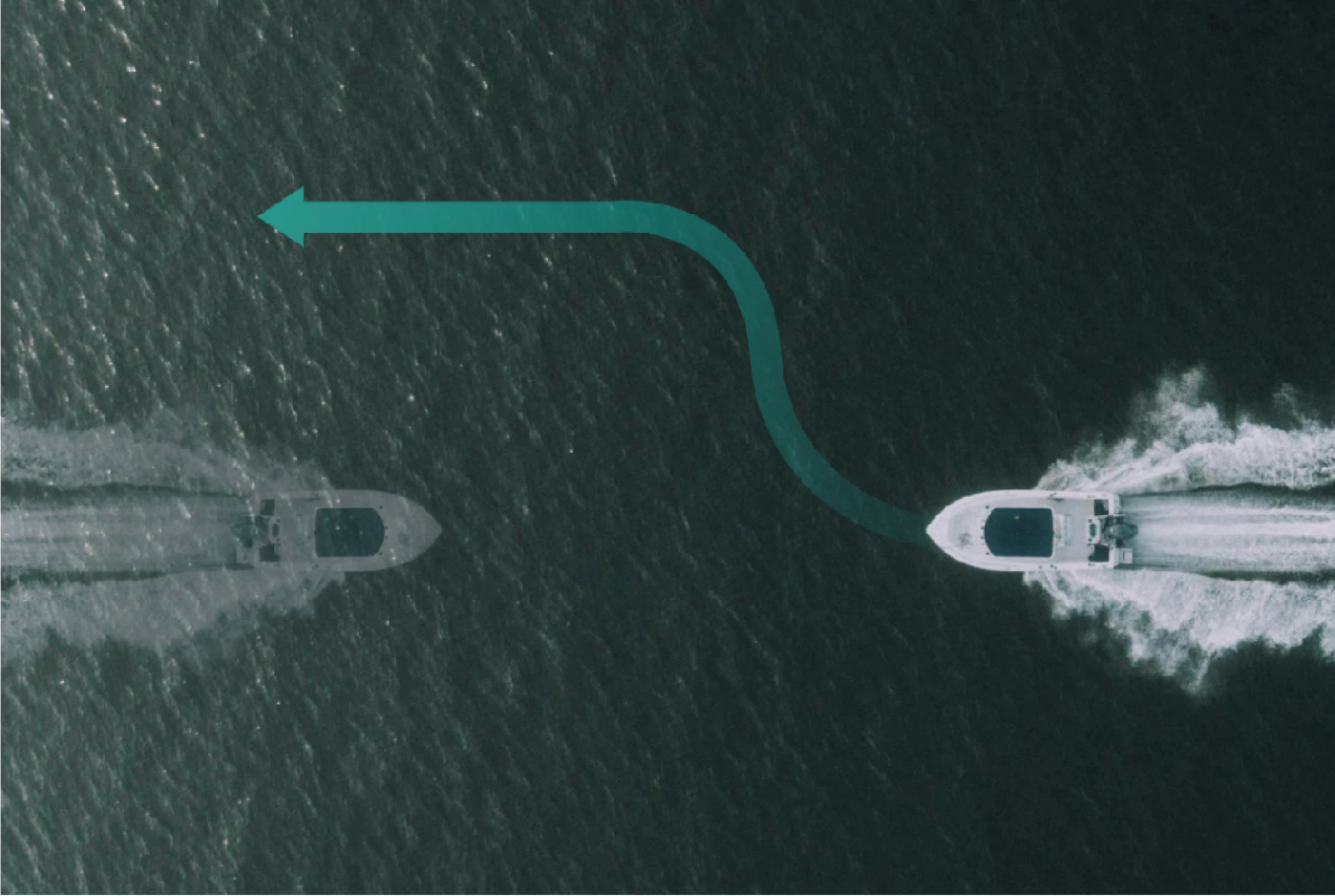

Collision Avoidance
Incorporating COLREGs and the experience of professional mariners into the autonomous collision avoidance algorithm. Achieving safe and smooth autonomous collision avoidance through environmental perception, autonomous route planning and control.
Dynamic Positioning
Automatically adjusts the vessel's throttle and steer based on real-time monitoring of wind direction, current speed, etc. to achieve precise position and heading keeping.
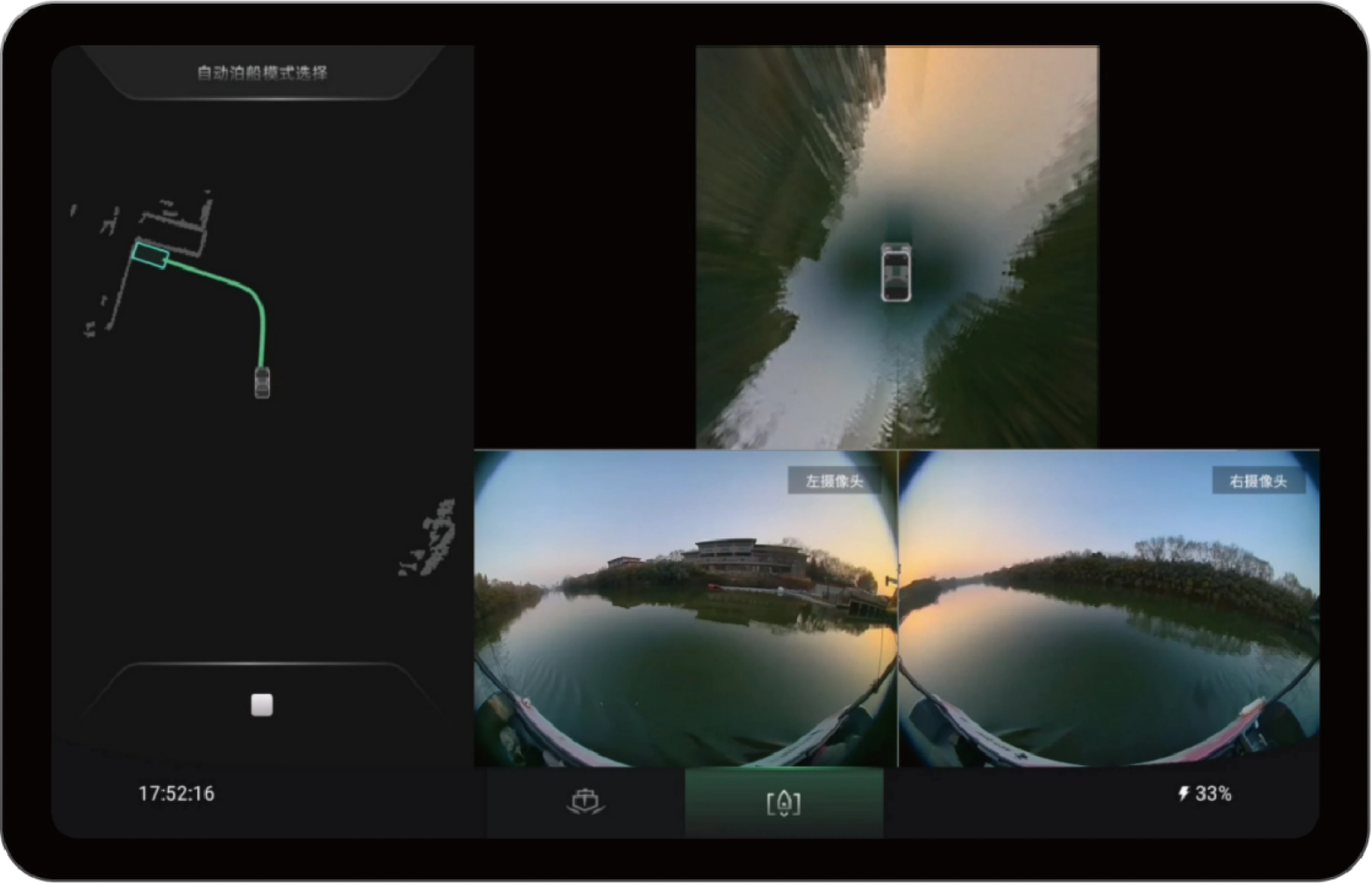
Automated Docking and Undocking
Autonomously detecting berths and assessing docking conditions Adjusting the vessel's speed and direction automatically Ensuring safe and stable docking and undocking.
Docking
Mode 1
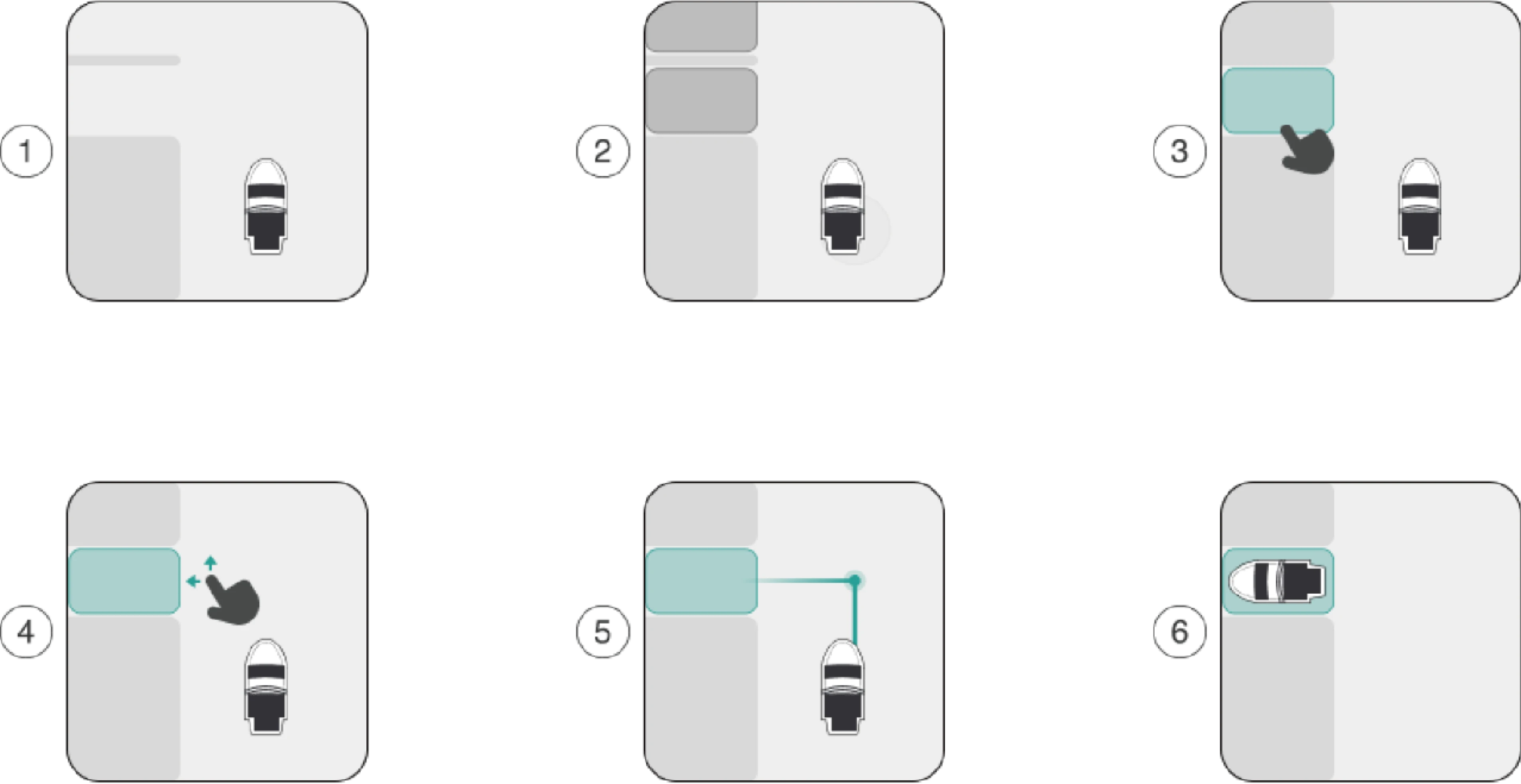
Navigate close to the dock
Detect berths
Select a target berth(User)
Select direction(User)
Plan a route
Dock autonomously
Mode 2

Select a berth used before (User)
Press start(User)
Plan a route
Dock autonomously
Undocking
Press start (User)
Analyze the surrounding environment
Plan a route
Navigate out of the berth
 陕公网安备61019002002774
陕公网安备61019002002774